



Pulse Control 2 Theem Kaw Loop Stepper Tsav T86


Khoom Taw Qhia



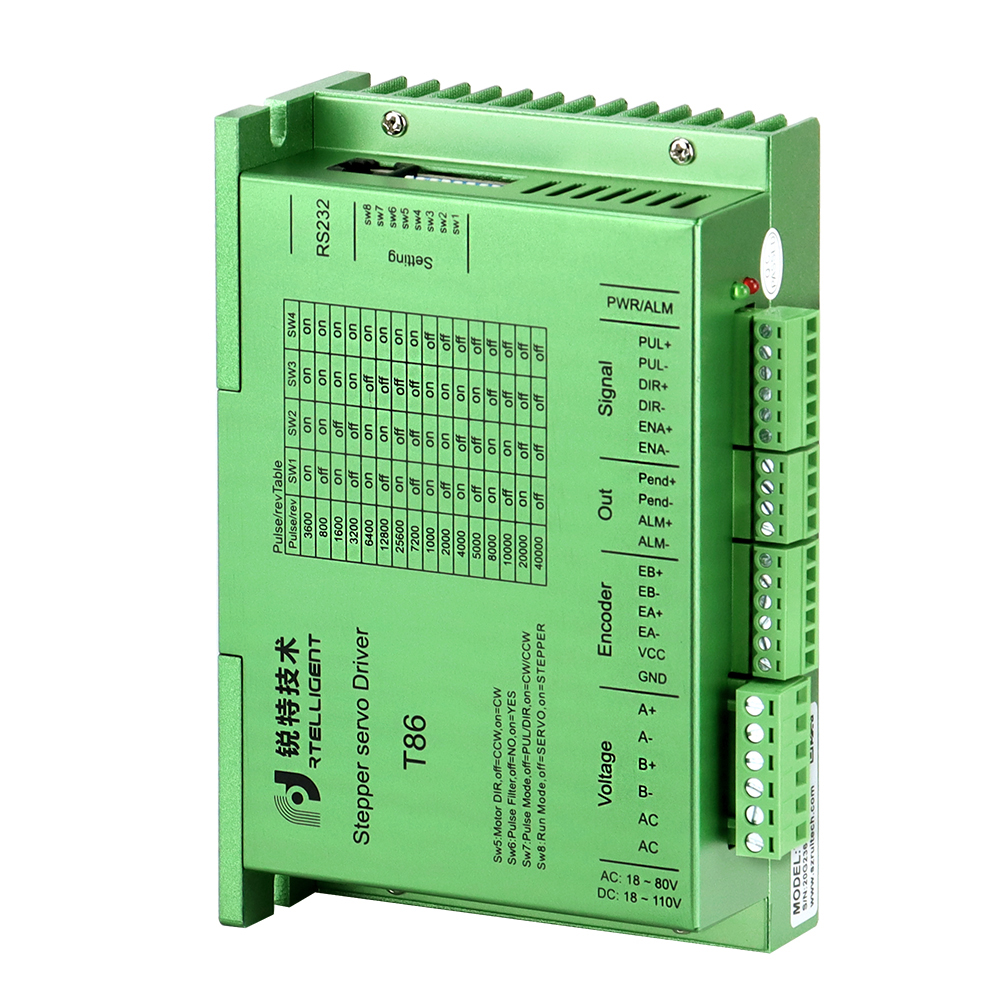
Kev sib txuas

Nta
| Fais fab mov | 18-80VAC / 18-110VDC |
| Tswj precision | 4000 Pulse/r |
| Pulse hom | Kev taw qhia & mem tes, CW / CCW ob lub mem tes |
| Kev tswj tam sim no | Servo vector tswj algorithm |
| Micro-stepping nqis | DIP hloov chaw, lossis debugging software teeb tsa |
| Ntau yam ceev | Pa 1200 ~ 1500rpm, mus txog 4000rpm |
| Resonance tiv thaiv | Tsis siv neeg xam qhov taw tes resonance thiab inhibit IF vibration |
| PID parameter hloov | Kuaj software los kho lub cev muaj zog PID yam ntxwv |
| Pulse filtering | 2MHz digital teeb liab lim |
| Tswb tso zis | Tswb tso zis ntawm over-tam sim no, dhau-voltage, txoj hauj lwm yuam kev, thiab lwm yam |
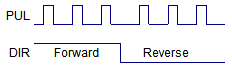
Pulse hom
Tus qauv T series tsav tsheb teeb liab interface yog nyob rau hauv daim ntawv ntawm mem tes, thiab T86 tuaj yeem tau txais ob hom mem tes hais kom ua.
| Pulse thiab kev taw qhia (PUL + DIR) |
|
| Ob chav mem tes (CW + CCW) | 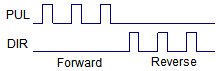 |
Micro-stepping Chaw
| Pulse/rev | SW 1 | SW 2 | SW 3 | SWB 4 | Lus hais |
| 3600 ib | on | on | on | on | Lub DIP hloov tau tig mus rau "3600" lub xeev thiab cov kev sim software tuaj yeem hloov pauv lwm yam kev faib tawm dawb. |
| 800 | tawm | on | on | on | |
| 1600 | on | tawm | on | on | |
| 3200 | tawm | tawm | on | on | |
| 6400 ib | on | on | tawm | on | |
| 12800 Nws | tawm | on | tawm | on | |
| 25 600 | on | tawm | tawm | on | |
| 7200 ib | tawm | tawm | tawm | on | |
| 1000 | on | on | on | tawm | |
| 2000 | tawm | on | on | tawm | |
| 4000 | on | tawm | on | tawm | |
| 5000 | tawm | tawm | on | tawm | |
| 8000 | on | on | tawm | tawm | |
| 10000 | tawm | on | tawm | tawm | |
| 20000 | on | tawm | tawm | tawm | |
| 40000 | tawm | tawm | tawm | tawm |
Product Description
Qhia txog lub siab tshaj plaws pulse-tswj ob-theem kaw-loop stepper tsav tsheb, cov khoom siv hloov pauv uas muab cov cuab yeej siv thev naus laus zis nrog kev ua haujlwm tshwj xeeb thiab kev ntseeg tau. Qhov kev sib tw stepper tsav tsheb no yog tsim los hloov txoj kev precision motors tswj, kom ntseeg tau tias kev ua haujlwm zoo thiab raug rau ntau yam kev siv.
Ib qho ntawm cov yam ntxwv tseem ceeb ntawm tus tsav tsheb kauj vab zoo tshaj plaws no yog nws lub voj kaw kaw, uas ua kom muaj kev tswj xyuas meej thiab tshem tawm cov kauj ruam poob, txawm tias nyob rau hauv kev xav tau kev ua haujlwm. Nrog nws cov txheej txheem tswj cov mem tes siab heev, tus tsav tau lees paub qhov tseeb ntawm qhov chaw, kev ua haujlwm du thiab txo kev co, xa cov kev ua tau zoo thiab ruaj khov.
Lub pulse-tswj ob-theem kaw-voj stepper tsav tsheb kuj tseem muaj cov qauv tsim rugged thiab sib txuas nrog cov thev naus laus zis tshiab microprocessor. Qhov no tso cai rau nws ua tiav cov zis ntau dua thiab ua haujlwm hnyav dua, ua rau nws zoo tagnrho rau kev lag luam automation, neeg hlau, CNC tshuab cuab yeej thiab lwm yam kev siv high-precision. Nws high-resolution motor tswj algorithm kom meej meej tswj cov lus tsa suab, ua rau nws yog ib qho kev xaiv zoo tshaj plaws rau cov dej num uas yuav tsum tau ua kom nyuaj.
Cov tsav tsheb kuj tau nruab nrog kev tswj hwm tus kheej ntse uas tuaj yeem kuaj xyuas thiab kho txhua qhov yuam kev lossis kev sib txawv. Qhov no ua kom muaj kev ua tau zoo ib yam thiab txo qhov xav tau ntawm phau ntawv hloov kho lossis ntsuas ntsuas, txuag cov neeg siv sijhawm thiab siv zog.
Tsis tas li ntawd, pulse-tswj ob-theem kaw-voj stepper drives muaj ntau yam thiab sib xws nrog ntau hom tsav, suav nrog bipolar thiab unipolar stepper motors. Nws cov kev sib txuas yooj yim interface thiab cov neeg siv-phooj ywg tswj vaj huam sib luag ua rau nws yooj yim rau kev sib koom ua ke thiab ua haujlwm seamlessly nrog cov tshuab uas twb muaj lawm, txo lub sijhawm teeb tsa thiab qhov nyuaj.
Hauv cov ntsiab lus, Pulse Controlled Ob-Phase Closed Loop Stepper Tsav Tsheb yog cov khoom hloov pauv kev ua si uas suav nrog kev tsim kho tshiab, precision thiab kev ntseeg siab hauv ib lub cuab yeej muaj zog. Nws cov yam ntxwv tshwj xeeb xws li kaw-voj tswj, kev tswj cov mem tes siab heev, kev tswj tus kheej muaj peev xwm thiab ntau yam ua rau nws zoo tagnrho rau cov ntawv thov uas xav tau qhov siab tshaj plaws thiab ua haujlwm tau zoo. Muaj kev paub txog yav tom ntej ntawm stepper lub cev muaj zog tswj thiab qhib qib tshiab ntawm kev ua tau zoo thiab kev tsim khoom nrog cov khoom tshwj xeeb no.
-
 Kho Rtelligent T86 Phau Ntawv Qhia
Kho Rtelligent T86 Phau Ntawv Qhia